Servo Hacking Tutorial
Ein Modellbauservo lässt sich leicht in einen Getriebemotor umbauen. Dieser kann endlos in die selbe Richtung drehen, hat aber keine Positionsregelung mehr.
Was ist Servohacking?
Unter Servohacking versteht man den Umbau eines Modellbauservos zu einem Getriebemotor mit 360 Grad Drehwinkel.
Um einen Servo umzubauen, muss man den Positionsregelkreis unterbrechen und mechanische Sicherheitsanschläge im
Servo entfernen. Auf dieser Seite sind zwei detailierte, bebilderte Tutorials zum Servohacking zu finden.
Wie hackt man einen Servo?
Es gibt zwei Möglichkeiten einen Servo zu hacken. Sie unterscheiden sich in der Art wie der Servo nach dem Umbau angesteuert werden soll.
Entweder man steuert ihn mit dem selben PWM Signal an, wie es von einem RC-Empfänger generiert wird, oder man steuert den Servo wie einen
klassichen Getriebemotor an: Einer DC Spannung, einem Motorentreiber oder einem Relais. Wähle aus den beiden Servo Hacking Tutorials das
Vorgehen aus, das für deine Anwendung passt:
Zu den Servo Hacking Tutorials
Die klassische Variante
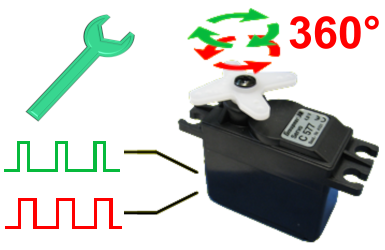
Servo Hacking für PWM Ansteuerung
Bei der PWM- Variante wird der Servo mit den selben PWM- Siganlen angesteuert wie ein nicht gehackter Servo. So kann er immer noch in einem RC- Modell eingesetzt werden. Das Eingangssignal kann auch von einem Mikrocontroller generiert werden. Mit der Pulsweite könne Drehrichtung und -geschwindigkeit gesteuert werden.
Servo Hacking für PWM Ansteuerung
Bei der PWM- Variante wird der Servo mit den selben PWM- Siganlen angesteuert wie ein nicht gehackter Servo. So kann er immer noch in einem RC- Modell eingesetzt werden. Das Eingangssignal kann auch von einem Mikrocontroller generiert werden. Mit der Pulsweite könne Drehrichtung und -geschwindigkeit gesteuert werden.
DC-Variante
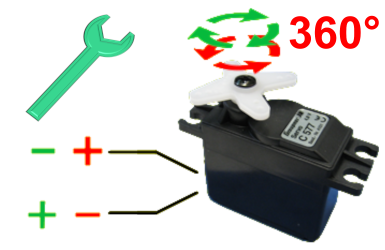
Servo Hacking für DC Ansteuerung
Bei der DC- Variante wird der Servo mit Gleichstrom gesteuert. Es besteht kein Unterschied zwischen einem solchem Servo und einem handelsüblichem Getriebemotor. Die Drehrichtung und -geschwindigkeit kann mit der Polarisierung und Stärke des Gleichstromes gesteuert werden.
Servo Hacking für DC Ansteuerung
Bei der DC- Variante wird der Servo mit Gleichstrom gesteuert. Es besteht kein Unterschied zwischen einem solchem Servo und einem handelsüblichem Getriebemotor. Die Drehrichtung und -geschwindigkeit kann mit der Polarisierung und Stärke des Gleichstromes gesteuert werden.
Vor- und Nachteile von gehackten Servos gegenüber Getriebemotoren
Vorteile eines Gehackten Servos
- Gehackte Servos sind günstig
- Ein Servo hat die Montagevorrichtung bereits am Gehäuse. Er kann einfach festgeschraubt werden.
- Einfache Montage von Rädern an der drehenden Achse dank dem Stellkreuz.
Vorteile eines Getriebemotors:
- Gleichmässigere Drehung
- Robustes Metallgetriebe
Anwendungsbeispiele und Projekte
Antriebstechnik
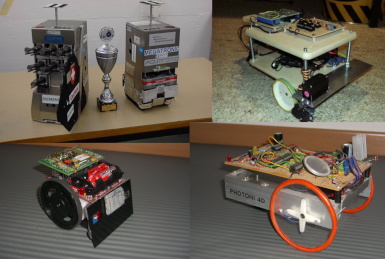
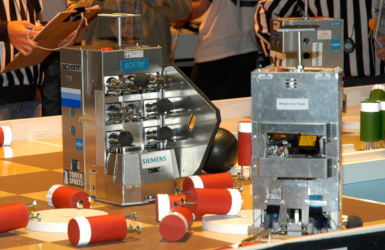
Roboter mit gehackten Servos als Antriebe
Die meisten meiner Roboterporjekte verwenden gehackte Servos für den Antrieb.
Roboter mit gehackten Servos als Antriebe
Die meisten meiner Roboterporjekte verwenden gehackte Servos für den Antrieb.
Bauanleitung
Servo Hacking für DC Ansteuerung
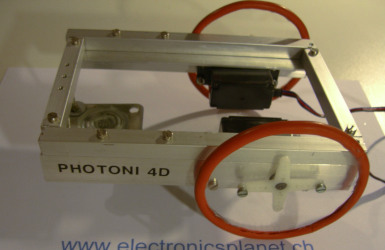
Die Anleitung zum Bau eines Roboter Fahrgestells ist für den Antrieb mit gehackten servos ausgelegt.
Servo Hacking für DC Ansteuerung
Die Anleitung zum Bau eines Roboter Fahrgestells ist für den Antrieb mit gehackten servos ausgelegt.
X

Bild 1: Der NPN Transistor kann wie ein Schalter eingesetzt werden
Bild 1: Der NPN Transistor kann wie ein Schalter eingesetzt werden
Das könnte dich auch langweilen:
Eurobot hautnah
Erlebe mobile Roboter in Action

Modellbauservos
Servostecker Belegung
Roboter Theorie
Roboter Blockschaltbild

Projekte
Elektronisches Katzenkatapult