Roboter Blockschaltbild
Autonome Mobile Roboter sind vielseitig. Aber die meisten lassen sich mit einem gemeinsamen Blockschaltbild beschreiben.
Dabei wird auch klar, dass die Umwelt in der der Roboter sich bewegt in das Blockschaltbild einbezogen werden kann und
dass der Roboter nur zusammen mit seiner Umwelt eine eigenständige Funktionsweise ausüben kann.
Ein autonomer mobiler Roboter bewegt sich selbstständig in seiner Umgebung und erfüllt eine mehr oder weniger sinnvolle Aufgabe. Dazu werden Dazu benötigt er viele verschiedene elektronische Schaltungen, die sich in vier Kategorien einteilen lassen können:
- Sensor en
- Aktoren
- Kontrolleinheit
- Spannungsversorgung
Abbildung 1 zeigt die Blöcke, wie sie zusammengeschaltet werden.

Bild 1: Roboter mit Sensoren und Aktoren
Sensoren
Die Sensoren erfassen die Umgebung und liefern der Kontrolleinheit relevante Informationen, die benötigt werden um die Lage und Position des Roboters in der Umgebung zu bestimmen. Beispiele für Sensoren sind: Kameras, Distanzsensoren, Lichtsensoren wie LDR’s, Infrarotsensoren, Ultraschallsensoren, Kontaktsensoren oder Empfänger für optische Leitsignale.Kontrolleinheit
Die Kontrolleinheit wertet die Sensorinformationen aus und fällt Entscheidungen, wie auf die erfasste Umwelt zu reagieren ist. Entsprechend veranlasst sie die Aktoren, sich situationsbedingt zu verhalten und Aktionen auszuführen. Für die Kontrolleinheit wird in der Regel ein Mikrocontrollersystem verwendet. Bei einfachen Spielzeugrobotern kann auch mal fest verdrahtete Logik zum Einsatz kommen.Aktoren
Die Aktoren bewegen den Roboter und seine Elemente. Neben dem Antrieb zählen zu den Aktoren auch Roboterteile wie Greifarme, schwenkantriebe von Sensoren, Beleuchtung, Lautsprecher, Servomotoren und alle anderen mechanischen Teile, die der Roboter benötigt um seine Aufgabe auszuführen.Spannungsversorgung
Bei mobilen Robotern ist die Spannungsversorgung meistens ein Akku und die Spannungsregler.Die Umgebung im Zusammenspiel mit dem Roboter
Bei einem Roboter, der mit seiner Umgebung interagiert kann die Umgebung als Teil der Funktionsblöcke
dargestellt werden. Die Umgebung wirkt mit ihren Einflüssen auf die Sensoren ein und erzeugen die
Sensorinformationen.
Wenn die Kontrolleinheit die Sensordaten auswertet erteilt sie den Aktoren Kommandos, die die Lage
des Roboters in der Umgebung verändern. Zum Beispiel, indem sie den Roboter in Bewegung setzen oder
einen Richtungswechsel veranlassen. Oder die Aktoren verändern die Umgebung, zum Beispiel, indem sie
ein Objekt aus der Umgebung aufsammeln.

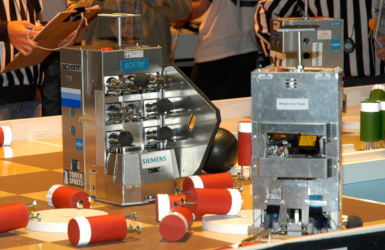
Bild 2: Roboter mit Sensoren und Aktoren in seiner Umgebung
Diese Veränderung der Umwelt oder die Veränderung der Roboterposition wird von den Sensoren
wiederum durch Ihre Wahrnehmung der Umwelt festgestellt. So entsteht ein elektromechanischer
Funktionskreis in dem Roboter und Umwelt sich gegenseitig beeinflussen.
X
Bild 1: Roboter mit Sensoren und Aktoren
Bild 1: Roboter mit Sensoren und Aktoren
X
Bild 2: Roboter mit Sensoren und Aktoren in seiner Umgebung
Bild 2: Roboter mit Sensoren und Aktoren in seiner Umgebung
Das könnte dich auch langweilen:
Nur für wahre Nerds
Electronicsplanet Roboterprojekte
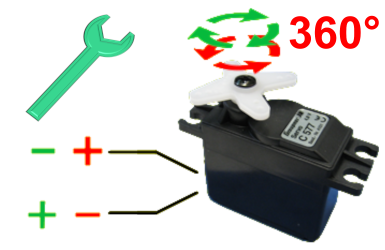
Servohacking
Servo zum Getriebemotor umbauen
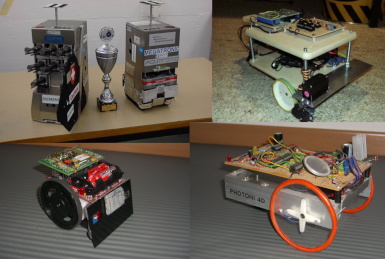
Autonome Mobile Roboter
Roboter mechanisches Chassis Bauanleitung
Eurobot hautnah
Erlebe mobile Roboter in Action