Roboter Fahrgestell bauen
Wir bauen ein einfaches, aber robustes Fahrgestell für einen Roboter. Diese Schritt für Schritt Anleitung führt dich von den mechanischen Einzelteilen bis zum fertigen Fahrgstell. Es bietet Platz für ein Euro-PCB, zwei Servos als Antrieb und einen Akku.
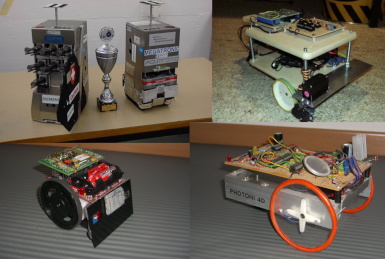
Photoni 4D ist ein kleiner, putziger Roboter mit einem zweckgemässem Fahrgestell aus Aluminiumprofilen. Der Roboter gehört zu der Kategorie der Lichtsucher. Das bedeutet, er fährt immer zur hellsten Stelle des Raums und weicht sogar Hindernissen aus, wenn sie einen Schatten werfen. Mit diesem Fahrgestell kann man aber alle Arten von autonomen, mobilen Robotern aufbauen. Photoni4D und weitere Roboter kannst du in der Robotergalerie bewundern.
Lest weiter um zu sehen, wie das Fahrgestell gebaut werden kann:
Lest weiter um zu sehen, wie das Fahrgestell gebaut werden kann:

Bild 1: Roboter Photoni 4D
Schritt 1:
Zwei Winkelprofile mit der Länge von 160mm und einer Breite von mindestens 18mm bilden die Grundträger des Roboter Fahrgestells. Es werden diverse Löcher benötigt. Seitlich werden ein gorsses Loch und zwei Löcher mit M3 Gewinde gebohrt, so dass man an ihnen einen gehackten Modellbauservo befestigen kann. So wie in Bild 6 gezeigt.
Auf der Oberseite werden vier Löcher mit M3 Gewinde gebohrt. An ihnen werden die Rahmenelemente befestigt, wie in Bild 5 zu sehen ist.
Auf der Oberseite werden vier Löcher mit M3 Gewinde gebohrt. An ihnen werden die Rahmenelemente befestigt, wie in Bild 5 zu sehen ist.

Bild 2: Winkelprofil
Schritt 2:
Die Seitenverstrebungen des Rahmens vom Roboter Fahrgestell sind Aluprofile mit quadratischem Querschnitt. Sie sind 160mm lang und haben eine Kantenlänge von 10mm. Sie benötigen zwei Löcher für M3 Schrauben, die mit den Löchern der Winkelprofile übereinstimmen.
Bohre auch Löcher mit M3 Gewinden in die Ecken, so dass sie mit den Mountingholes deiner Europlatene übereinstimmen. Eventuell musst du diesen Schritt später machen, wenn das Fahrgestell komplett zusammengeschraubt ist. Dann ist es einfacher, die Löcher anhand der Platine anzuzeichnen.
Bohre auch Löcher mit M3 Gewinden in die Ecken, so dass sie mit den Mountingholes deiner Europlatene übereinstimmen. Eventuell musst du diesen Schritt später machen, wenn das Fahrgestell komplett zusammengeschraubt ist. Dann ist es einfacher, die Löcher anhand der Platine anzuzeichnen.

Bild 3: Seitenverstrebung
Schritt 3:
Das Roboter Fahrgestell hat zwei Querverstrebungen Sie sind 80mm lang und haben eine Kantenlänge von 10mm. Auch sie benötigen zwei Löcher für M3 Schrauben, die mit den Löchern der Winkelprofile übereinstimmen.
Bohre auch zwei Löcher mit M3 Gewinden in eines der Profile, so dass sie mit den Löchern deines Hinterrades übereinstimmen. Siehe Schritt 8. Eventuell musst du diesen Schritt später machen, wenn das Fahrgestell komplett zusammengeschraubt ist. Dann ist es einfacher, die Löcher anhand der Platine anzuzeichnen.
Bohre auch zwei Löcher mit M3 Gewinden in eines der Profile, so dass sie mit den Löchern deines Hinterrades übereinstimmen. Siehe Schritt 8. Eventuell musst du diesen Schritt später machen, wenn das Fahrgestell komplett zusammengeschraubt ist. Dann ist es einfacher, die Löcher anhand der Platine anzuzeichnen.

Bild 4: Querverstrebungen
Schritt 4:
Schraube die sechs Teile zusammen um den Trägerahmen vom Roboter Fahrgestell fertigzustellen.

Bild 5: Rahmen
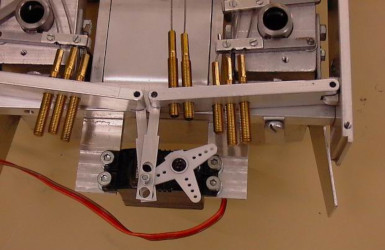
Schritt 5:
Mit langen Schrauben und einigen Muttern befestigst du beide gehackte Servos am Rahmen.

Bild 6: Servoeinbau
Schritt 6:
So sieht es von oben aus. Wenn du die Servodrehkreuze benötigst um die Räder daran zu montieren, kannst du sie schon jetzt dran schrauben.

Bild 7: Servodrehkreuz
Schritt 7:
Das bewegliche Hinterrad ist ein einfaches Möbelrad aus dem Baumarkt. Mit zwei langen Schrauben, einigen Muttern und Unterlagscheiben kannst du es an die hintere Querverstrebung befestigen.
So sieht es von unten aus.

Bild 8: Hinterrad
So sieht es von unten aus.

Bild 9: Hinterraddrehung
Schritt 8:
Befestige das Rad an der hinteren Querverstrebung. Das Rad sollte komplett unter dem Roboter Fahrgestell sein. Die Grundplatte des Hinterrads wird später als Ablagefälche für den Akku dienen.

Bild 10: Hinterradmontage
So sieht es von der Seite aus.

Bild 11: Seitenansicht
Schritt 9:
Bei den Rädern ist der Phantasie keine Grenzen gesetzt. Für dieses Tutorial hat das Roboter Fahrgestell Plexiglasräder erhalten, die mit einem aufgeschlitzten Gummiring umklebt sind. Mit zwei Löchern im korrekten Abstand, kann man sie auf die Servokreuze schrauben.

Bild 12: Räder
Fast fertig

Bild 13: Radmontage
Schritt 10:
Ein kleiner Blechstreifen mit zwei Löcher kann als Akkuhalterung dienen

Bild 14: Akkuhalterung
Er wird zwischen die Schrauben geklemmt, die die Servos halten. Nun kann man ein Standard-Modellbau-Akkupack auf der Hinterradfläche und diesem Blechbügel auflegen.

Bild 15: Akkuhalterung Einbau
Schritt 11:
Zum Schluss wird die Euro-Platine auf demFahrgestell montiert und der Roboter kann losfahren.
Viel Spass!
Viel Spass!

Bild 16: Endmontage Elektronik
Das könnte dich auch langweilen:
Servohacking
Servohacking Tutorial
Mechatronik Einblicke
Professionelles Roboterdesign
Roboter Theorie
Roboter Blockschaltbild
Nur für wahre Nerds
Electronicsplanet Roboterprojekte