Servo Funktionsweise
Eine Zusammenfassung über die Funktionsweise, den Aufbau und die Ansteuerung von Modellbauservos
Servo Positionsregelung
Ein Servo ist ein winkelgeregelter bzw. positionsgeregelter Aktuator. Das bedeutet, dass
er anhand seines Eingagnssignals eine bestimmte Winkelposition anfährt und diese hält. So
ist es möglich, verschiedene Positionen anzufahren, ohne dass man die Drehbewegung des
Modellbauservos erfassen und im richtigen Moment stoppen muss. Der Modellbauservo stoppt
die Drehung und hält die Position selbstständig.
Servo Signal
Ein Modellbauservo wird mit einem Pulsweiten modulierten Signal (PWM) angesteuert. Die
Information über den Winkel ist in der Länge der Pulse enthalten. Der zeitliche Abstend
zwischen zwei positiven Pulsflanken bleibt dabei unverändert. In der Animation sieht man,
wie die Pulsweite den Winkel beeinflusst.
Bild 1: Servo Signal und Stellwinkel
Servo Signalparameter
Die Zeiten tperiode und ton bestimmen den Servowinkel. Theoretisch sind die Zeiten auf 20ms
und 1-2ms standardisiert. Jedoch sind die meisten Servos nicht auf diese Zeiten abgestimmt. Untenstehende Tabelle
zeigt die Standardwerte und ein Beispiel von einem Servo der von diesen Zeiten abweicht. Diese Abweichung ist nicht
problematisch, aber man sollte ein Servo jeweils ausmessen, bevor man ihn ansteuert. So kann man den ganzen Bewegungsradius
des Servos ausnutzen.
| Device | tperiode | ton-min | ton-max |
| Theoretischer Standard | 20ms | 1ms | 2ms |
| Servo Futaba S3003 | 20ms | 0.58ms | 2.4ms |
Tabelle 1: Modellbauservo Signalparameter
Aufbau des Modellbauservos

Bild 2: Schnittbild durch den Modellbauservo mit den verschiedenen Komponenten

Bild 3: Das Zusammenspiel der Zahnräder im Servogetriebe
Modellbauservo Blockschaltbild
Der aufbau eines Modellbauservos hat die Funktion eines elektromechanischen Regelkreises.
Anhand des folgenden Blockschemas kann die Funktionsweise erklärt werden.
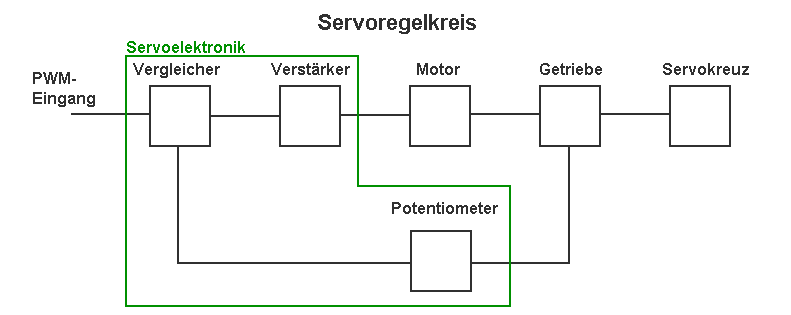
Bild 4: Blockschaltbild vom Servo und seinem Positions-Regelkreis
- Das PWM- Eingagnssignal wird in eine Gleichspannung gewandelt und vom Vergleicher mit der Spanung verglichen, die das Endpotentiometer liefert.
- Stimmen die Werte überein, ist die Servoposition korrekt und der Servo hält den Winkel. Stimmen die Werte nicht überein, setzt der Vergleicher über den Verstärker den Motor in Gang.
- Der Motor treibt das Getriebe an, dessen Endachse mit dem Potentiometer verbunden ist.
- Die Endachse dreht sich und mit ihr das Potentiometer.
- Sobld die rückgeführte Potetiometerspannung mit dem PWM-Signal übereinstimmt, ist der korrekte Winkel erreicht und wird vom Servo automatisch gehalten.
X
Bild 1: Servo Signal und Stellwinkel
Bild 1: Servo Signal und Stellwinkel
X
Bild 2: Schnittbild durch den Modellbauservo mit den verschiedenen Komponenten
Bild 2: Schnittbild durch den Modellbauservo mit den verschiedenen Komponenten
X
Bild 3: Das Zusammenspiel der Zahnräder im Servogetriebe
Bild 3: Das Zusammenspiel der Zahnräder im Servogetriebe
X
Bild 4: Blockschaltbild vom Servo und seinem Positions-Regelkreis
Bild 4: Blockschaltbild vom Servo und seinem Positions-Regelkreis
Das könnte dich auch langweilen:
Nur für wahre Nerds
Electronicsplanet Roboterprojekte
Nützliche Tools
Elektronik Rechner online
Autonome Mobile Roboter
Roboter mechanisches Chassis Bauanleitung

Projekte
Elektronisches Katzenkatapult